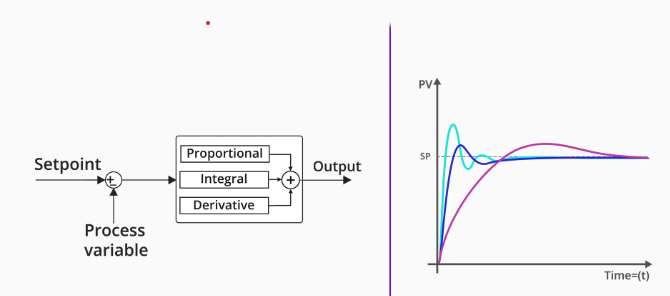
1. PID 컨트롤이란?
PID 제어는 오차(error) 를 보고 모터 출력을 자동으로 결정해주는 가장 기본적인 제어 방식이다.
-
목표값 (setpoint): 우리가 원하는 값 (예: 관절각도 60°)
-
현재값 (measurement): 센서가 측정한 실제 값 (예: 50°)
-
오차 (error):
\(e(t) = \text{목표값} - \text{현재값}\)
PID 제어기는 이 오차를 보고, 모터에 줄 출력(힘/토크)을 계산한다:
\[u(t) = K_P e(t) + K_I \int e(t)\,dt + K_D \frac{de(t)}{dt}\]여기서
- (K_P) : 비례 (Proportional) 게인
- (K_I) : 적분 (Integral) 게인
- (K_D) : 미분 (Derivative) 게인
을 뜻한다.
2. P, I, D 각각 직관적으로 이해하기
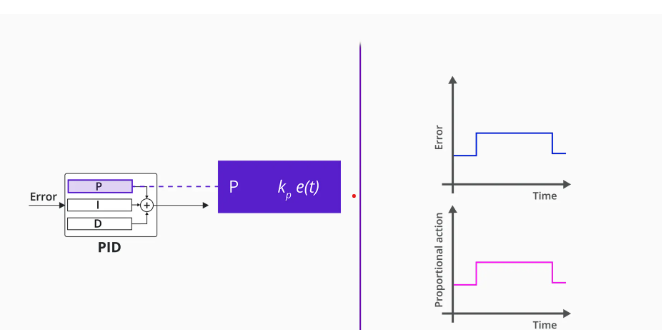
2.1 P (Proportional) — “오차만큼 당기는 스프링”
가장 기본적인 제어:
\[u_P(t) = K_P e(t)\]- 오차가 클수록 → 출력 크게
- 오차가 작을수록 → 출력 작게
예:
목표 각도 60°, 현재 50° → 오차 10°
→ (u_P = K_P \times 10)
그래서
토크 ≈ (각도 변화) × P-gain
은 P 제어만 쓴 아주 단순한 형태로 이해할 수 있다.
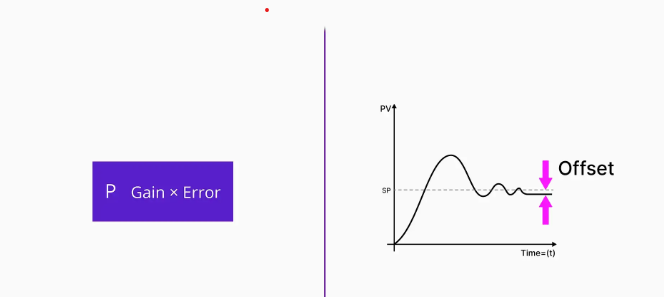
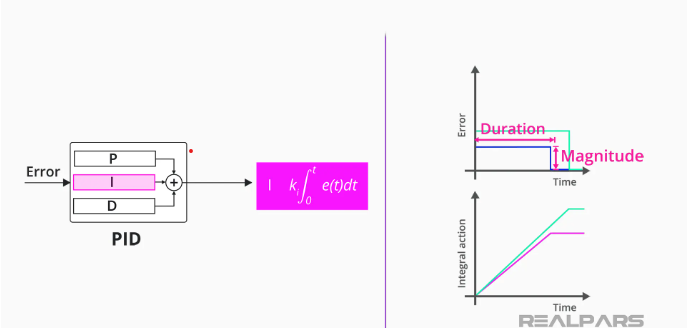
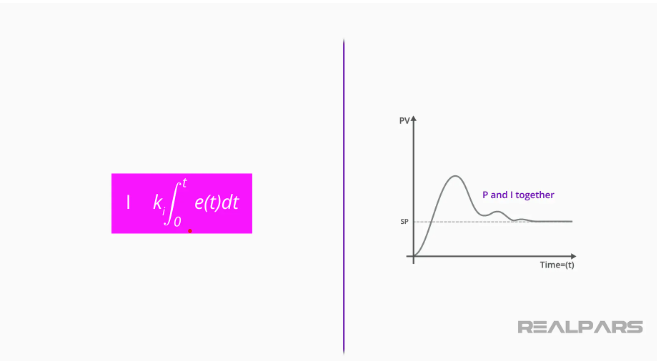
2.2 I (Integral) — “오랫동안 쌓이는 불만”
P 제어만 쓰면, 마찰/중력 때문에 항상 약간 모자란 상태로 멈출 수 있다.
I 제어는
\[u_I(t) = K_I \int e(t)\,dt\]- 오차가 오랫동안 계속되면
→ 그 오차를 “시간에 대해 누적(적분)”해서
→ 출력에 점점 더 많이 반영한다.
즉,
- 계속 2° 부족한 상태가 오래 가면
→ I 항이 점점 커지면서
→ 결국 목표각도에 더 가깝게 밀어 넣는다.
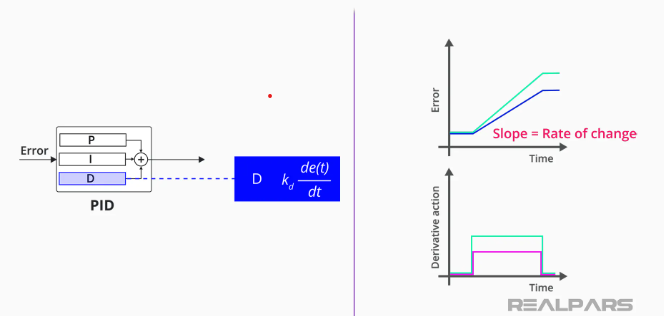
2.3 D (Derivative) — “속도를 잡아주는 댐퍼”
D 제어는 오차의 변화 속도를 본다.
\[u_D(t) = K_D \frac{de(t)}{dt}\]- 목표를 향해 너무 빠르게 접근하면
→ 브레이크를 걸어 overshoot(휙 지나갔다 되돌아오는 현상)을 줄인다. - 직관적으로는 댐퍼(damper) 나 쇼크업소버 같은 역할.
정리하면:
- P = 스프링 (각도 차이를 당기는 힘)
- D = 댐퍼 (속도에 비례해서 저항)
그래서 PD 제어 = 가상의 스프링 + 댐퍼,
이는 곧 임피던스 제어(impedance control) 와도 연결된다.
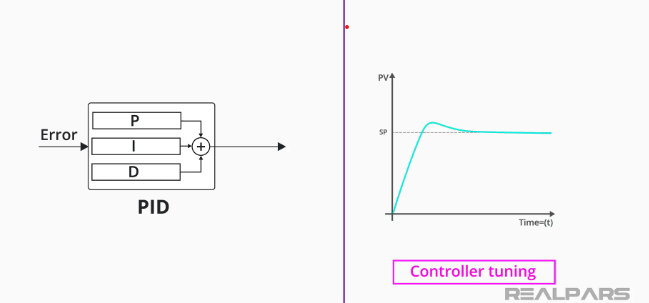
3. PID, PD 제어와 로봇/엑소(Harmony)의 관계
실제 로봇/엑소에서는 대략 이런 형태의 제어가 돌아간다:
목표 관절각도 (θ_des)
↓
[ PID / PD 제어기 ]
↓
모터 토크/전류
↓
실제 관절각도 (θ)
↓
센서 피드백
└───────(오차 계산으로 다시 위로)
Harmony 같은 재활 로봇은 내부적으로:
- 중력보상(gravity compensation)
- PD 기반 임피던스 제어 (position + velocity)
- 추가적인 saturation torque, baseline torque
등이 이미 설정되어 있다.
그래서 우리가 바깥에서 보는 토크는:
**센서 토크 = 로봇이 알아서 넣는 토크
- 사람 토크
- 관성/속도 성분**
이 섞인 값이다.
이 때문에:
- 단순히 “각도 오차 × P-gain = 사람의 joint torque”라고 보기 어렵고
-
진짜 생체 토크만 깔끔하게 분리하는 건 현실적으로 거의 불가능에 가깝다는 게
Keya가 강조한 포인트다.
4. PID 제어 한 줄 요약
- P (비례): 오차 크기에 비례해서 힘
- I (적분): 오차가 오래 지속될수록 보상 크게
- D (미분): 변화가 너무 빠를 때 속도를 늦추는 브레이크
로봇/엑소에서는 이 조합(PID/PD)으로
- 원하는 자세를 유지하고,
- 부드럽게 움직이고,
- 안전하게 사람과 상호작용하도록 만든다.
하지만 이런 내부 제어 때문에,
측정된 토크 값은 이미 “제어기+중력보상+사람”이 섞인 상태이고,
바깥에서 “사람 토크만” 꺼내 쓰려면 많은 가정과 모델링이 필요하다.
도입부
Harmony SHR의 로봇 팔꿈치 조인트에 저항을 주려고한다.
우선, 일반적인 아이디어를 통해 제어하려고 했다.
하모니 로봇의 EF(elbow) 조인트 각도를 계속 받아서, 팔이 움직일 때 그 반대 방향으로 살짝 setpoint를 밀어줘서 ‘저항감’을 만들어 주고, 그 모든 걸 CSV로 저장 + 플롯까지 하는 코드.
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
import socket
import time
import threading
import struct
import numpy as np
import pandas as pd
from datetime import datetime
import matplotlib.pyplot as plt
###############################################################################
# 설정(필수 import 아래에 둘 것)
###############################################################################
# --- 기록/플롯 공통 ---
cols = ['time', 'r0_theta', 'r1_theta', 'r2_theta', 'r3_theta', 'r4_theta', 'r5_theta', 'r6_theta', 'r5_set']
dict_list = []
now = datetime.now()
# --- 네트워크 ---
TARGET_IP = "192.168.2.1" # Harmony PC IP
TARGET_PORT = 12345 # Harmony 수신 포트
LOCAL_PORT = 12346 # 이 스크립트 수신 포트
# --- 과제(step) 모드 파라미터 ---
delta_theta_deg = 25.0
start_setpoint = np.deg2rad(90.0)
# --- 저항 모드(가상 임피던스) 파라미터 ---
RESISTIVE_MODE = True # True면 저항 모드 실행, False면 기존 step 과제 실행
CTRL_HZ = 100 # 저항 제어 업데이트 주파수(50~200 권장)
THETA_EQ_DEG = 90.0 # 평형 각도(라디안으로 변환해 사용)
KV = 0.08 # 점성 계수 (지령 오프셋[rad]/[rad/s])
KS = 0.00 # 스프링 계수 (지령 오프셋[rad]/[rad])
VEL_LP_ALPHA = 0.2 # 각속도 저역통과 계수(0~1, 클수록 빠름)
DEADBAND_VEL = 0.02 # 미세 속도 무시 데드밴드 [rad/s]
MAX_CMD_RATE = np.deg2rad(30) # 지령 변화율 제한 [rad/s]
THETA_MIN = np.deg2rad(45) # 안전 하한
THETA_MAX = np.deg2rad(135) # 안전 상한
# --- 실행 시간 ---
RESISTIVE_RUN_SEC = 60 # 저항 모드 실행 시간(초)
# --- 내부 상태 ---
stop_event = threading.Event()
r5_state = {
"theta": None,
"theta_prev": None,
"vel_lp": 0.0,
"t_recv": None,
"t_recv_prev": None
}
theta_cmd_current = np.deg2rad(THETA_EQ_DEG)
###############################################################################
# 유틸 / 통신 함수
###############################################################################
def command_send(sock, target_ip, target_port, command_setpoint):
"""EF_{theta} 포맷으로 위치 지령 전송 + 최신 상태 로깅"""
global dict_list
message = f"EF_{command_setpoint:.6f}".encode('utf-8')
send_time = time.time()
sock.sendto(message, (target_ip, target_port))
# 로그용: 마지막 수신 각도를 붙여 기록(없으면 NaN)
if dict_list:
angles = list(map(dict_list[-1].get, cols[1:-1])) # r0..r6
else:
angles = [np.nan] * 7
values = [send_time] + angles + [command_setpoint]
dict_data = {c: v for c, v in zip(cols, values)}
dict_list.append(dict_data)
def command_loop(sock, target_ip, target_port, start, end, delay):
"""±delta step 과제"""
for i in range(start, end + 1):
if i % 2 == 0:
angle_setpoint = np.deg2rad(90.0 + delta_theta_deg)
else:
angle_setpoint = np.deg2rad(90.0 - delta_theta_deg)
command_send(sock, target_ip, target_port, angle_setpoint)
print(f"[STEP] loop {i}, cmd={angle_setpoint:.3f} rad")
time.sleep(delay)
def udp_receiver(sock, start, end, delay, timeout=5):
"""Harmony에서 온 7개 double(r0..r6)을 수신하고 로깅 + r5 상태 업데이트"""
global dict_list, r5_state
sock.settimeout(timeout)
duration = (end - start) * delay + 15 if not RESISTIVE_MODE else (RESISTIVE_RUN_SEC + 5)
start_time = time.time()
while (time.time() - start_time) < duration and not stop_event.is_set():
try:
data, addr = sock.recvfrom(1024)
recv_time = time.time()
# 최소 7*8=56 bytes 필요
if len(data) < 56:
continue
try:
angle_values = list(struct.unpack('7d', data[:56]))
except struct.error:
continue
# 현재 setpoint 추적(마지막 dict_list의 r5_set 사용)
angle_setpoint = dict_list[-1][cols[-1]] if dict_list else start_setpoint
# 로깅
values = [recv_time] + angle_values + [angle_setpoint]
dict_data = {c: v for c, v in zip(cols, values)}
dict_list.append(dict_data)
# r5 상태 업데이트
r5_state["theta_prev"] = r5_state["theta"]
r5_state["t_recv_prev"] = r5_state["t_recv"]
r5_state["theta"] = angle_values[5] # r5_theta
r5_state["t_recv"] = recv_time
except socket.timeout:
print("[RX] timeout, exit receiver")
break
def resistive_controller(sock, target_ip, target_port):
"""가상 점성/스프링으로 '저항감' 부여: 움직임 반대 방향으로 setpoint 미세 조정"""
global theta_cmd_current
period = 1.0 / CTRL_HZ
theta_eq = np.deg2rad(THETA_EQ_DEG)
while not stop_event.is_set():
t0 = time.time()
th = r5_state["theta"]
th_prev = r5_state["theta_prev"]
t_recv = r5_state["t_recv"]
t_recv_prev = r5_state["t_recv_prev"]
if th is not None and th_prev is not None and t_recv is not None and t_recv_prev is not None:
dt = max(1e-3, t_recv - t_recv_prev) # 실제 수신 간격 기반
vel_raw = (th - th_prev) / dt
# 데드밴드 + 저역통과
if abs(vel_raw) < DEADBAND_VEL:
vel_raw = 0.0
r5_state["vel_lp"] = (1 - VEL_LP_ALPHA) * r5_state["vel_lp"] + VEL_LP_ALPHA * vel_raw
vel = r5_state["vel_lp"]
# 가상 임피던스 오프셋
offset = -KV * vel - KS * (th - theta_eq)
theta_target = theta_eq + offset
# 안전 범위
theta_target = float(np.clip(theta_target, THETA_MIN, THETA_MAX))
# 지령 변화율 제한
max_step = MAX_CMD_RATE * period
step = float(np.clip(theta_target - theta_cmd_current, -max_step, max_step))
theta_cmd_current += step
command_send(sock, target_ip, target_port, theta_cmd_current)
# 주기 유지
dt_sleep = period - (time.time() - t0)
if dt_sleep > 0:
time.sleep(dt_sleep)
###############################################################################
# 플로팅/후처리
###############################################################################
def find_edges(setpoints):
edges_idx = []
for i in range(1, len(setpoints)):
if setpoints[i - 1] != setpoints[i]:
edges_idx.append(i)
return edges_idx
def plot_data(filename, plot_vlines=True):
df = pd.read_csv(filename)
edges_idx = find_edges(df.r5_set)
plt.plot(df.time, df.r5_theta, label='measured angle')
# 주의: 기존 코드에서 setpoint에 -1 곱했는데, 그게 꼭 필요한 이유가 없다면 제거
plt.plot(df.time, df.r5_set, label='setpoint')
deltat = 0.04
if plot_vlines and len(edges_idx) > 0:
for idx, edge_idx in enumerate(edges_idx):
if idx == 0:
plt.axvline(df.iloc[edge_idx]['time'] + deltat, color='r', label="0.04 s after command")
plt.axvline(df.iloc[edge_idx]['time'] + 0.165, color='k', label="0.165 s after command")
else:
plt.axvline(df.iloc[edge_idx]['time'] + deltat, color='r')
plt.axvline(df.iloc[edge_idx]['time'] + 0.165, color='k')
plt.legend()
plt.xlabel('Time (s)')
plt.ylabel('Angle (rad)')
plt.title(filename)
plt.show()
###############################################################################
# 메인
###############################################################################
if __name__ == "__main__":
# 과거 CSV만 그림 그리고 싶으면 True
ONLY_PLOT = False
file_only_plot = "" # 예: 'command-angle-11-11-2025_15-10-00.csv'
if ONLY_PLOT:
plot_data(file_only_plot, plot_vlines=False)
raise SystemExit(0)
# 소켓 준비
sock = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
sock.bind(("0.0.0.0", LOCAL_PORT))
# 수신 스레드 시작
start = 0
end = 10
delay = 5
receiver_thread = threading.Thread(target=udp_receiver, args=(sock, start, end, delay))
receiver_thread.daemon = True
receiver_thread.start()
# 초기 평형각으로 세팅
time.sleep(0.5)
theta_cmd_current = np.deg2rad(THETA_EQ_DEG)
command_send(sock, TARGET_IP, TARGET_PORT, theta_cmd_current)
time.sleep(0.5)
if RESISTIVE_MODE:
# 저항 모드: 고주기 제어 스레드
ctrl_thread = threading.Thread(target=resistive_controller, args=(sock, TARGET_IP, TARGET_PORT))
ctrl_thread.daemon = True
ctrl_thread.start()
# 설정 시간 동안 실행
time.sleep(RESISTIVE_RUN_SEC)
stop_event.set()
ctrl_thread.join()
else:
# 기존 step 과제
command_loop(sock, TARGET_IP, TARGET_PORT, start, end, delay)
command_send(sock, TARGET_IP, TARGET_PORT, start_setpoint)
# 수신 스레드 종료 대기
receiver_thread.join()
# 소켓 닫기
sock.close()
print("Done")
# CSV 저장 + 플롯
df_final = pd.DataFrame.from_dict(dict_list)
date_time = now.strftime("%m-%d-%Y_%H-%M-%S")
filename = 'command-angle-' + date_time + '.csv'
df_final.to_csv(filename, index=False)
print(f"Saved: {filename}")
plot_data(filename)
중요 아이디어
가상 임피던스(스프링+댐퍼) 아이디어로 목표각(setpoint)을 움직임의 반대쪽으로 살짝 밀어
사용자가 느끼는 저항감을 만들어 준다.
즉, 로봇이 바로 잡아당기기보다는 지령각을 계속 조정해서 “버티는 느낌”을 주는 방식이다.
구체적인 방식
- 센서(UDP)에서 r5 각도/시간을 계속 받음
-
udp_receiver()가r5_state["theta"]와 이전 값(theta_prev), 수신 시각(t_recv,t_recv_prev)을 갱신해요. - 실제 수신 간격
dt = t_recv - t_recv_prev로 각속도를 계산할 준비를 해요.
- 각속도 추정 + 노이즈 억제
-
resistive_controller()에서- 원시 속도
vel_raw = (th - th_prev) / dt - 속도 데드밴드 적용:
abs(vel_raw) < DEADBAND_VEL이면 0으로 - 1차 저역통과:
vel_lp = (1-α)*vel_lp + α*vel_raw(여기서 α =VEL_LP_ALPHA) 이렇게 해서 튀는 속도값을 억제
- 원시 속도
- 가상 임피던스(댐퍼 + 스프링)로 지령 오프셋 계산
-
평형각:
theta_eq = deg2rad(THETA_EQ_DEG)(기본 90°) -
오프셋:
offset = -KV * vel - KS * (th - theta_eq)-
-KV * vel→ 점성(댐핑): 사용자가 +방향으로 빠르게 돌리면 setpoint는 -방향으로 살짝 이동해서 속도에 비례한 저항을 느낌 -
-KS * (th - theta_eq)→ 스프링(복원력): 평형각에서 벗어나면 setpoint가 반대쪽으로 당겨져 위치 오차에 비례한 복원력을 느낌
-
-
목표 지령각:
theta_target = theta_eq + offset
- 안전/부드러움 처리
-
안전 각도 제한:
THETA_MIN~THETA_MAX로theta_target를np.clip -
지령 변화율 제한:
- 제어주기
period = 1/CTRL_HZ - 한 주기 최대 변화량:
max_step = MAX_CMD_RATE * period - 실제 스텝:
step = clip(theta_target - theta_cmd_current, ±max_step) - 누적:
theta_cmd_current += step→ 갑작스런 지령 점프를 막아 부드럽고 안전하게 저항.
- 제어주기
실제 영상
피드백
osciliate 가 심하다
이 osciliate를 줄이기 위해서 PID 컨트롤 중 I를 제외하고 PD 컨트롤을 사용하려고 한다.

PID 컨트롤 사용
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
import socket
import time
import threading
import struct
import numpy as np
import pandas as pd
from datetime import datetime
import matplotlib.pyplot as plt
###############################################################################
# 설정(필수 import 아래에 둘 것)
###############################################################################
# --- 기록/플롯 공통 ---
cols = ['time', 'r0_theta', 'r1_theta', 'r2_theta', 'r3_theta', 'r4_theta', 'r5_theta', 'r6_theta', 'r5_set']
dict_list = []
now = datetime.now()
# --- 네트워크 ---
TARGET_IP = "192.168.2.1" # Harmony PC IP
TARGET_PORT = 12345 # Harmony 수신 포트
LOCAL_PORT = 12346 # 이 스크립트 수신 포트
# --- 과제(step) 모드 파라미터 ---
delta_theta_deg = 25.0
start_setpoint = np.deg2rad(90.0)
# --- 제어 모드 ---
RESISTIVE_MODE = True # True면 제어 스레드 실행(아래 PD), False면 기존 step 과제 실행
CTRL_HZ = 100 # 제어 주파수(50~200 권장)
# --- PD 제어(가상 임피던스) 파라미터 ---
# 목표: 평형각(theta_eq)에서 벗어나는 움직임에 "부드러운 저항감" 제공
THETA_EQ_DEG = 70 # 평형각(deg)
KP = 0.15 # P 이득(스프링 강성에 해당) [rad/rad] -> setpoint 오프셋 배율
KD = 0.06 # D 이득(점성에 해당) [rad/(rad/s)] -> 속도에 비례한 오프셋
DERIV_LP_ALPHA = 0.2 # 속도 추정 저역통과 계수(0~1, 클수록 빠름)
DEADBAND_VEL = 0.02 # 작은 속도 무시 [rad/s]
# --- 지령(출력) 스무딩/제한 ---
CMD_LP_ALPHA = 0.2 # 지령 저역통과 계수(0~1) — setpoint 자체도 부드럽게
MAX_CMD_RATE = np.deg2rad(30) # 지령 변화율 제한 [rad/s]
THETA_MIN = np.deg2rad(45) # 안전 하한
THETA_MAX = np.deg2rad(135) # 안전 상한
# --- 실행 시간 ---
RESISTIVE_RUN_SEC = 60 # 제어 실행 시간(초)
# --- 내부 상태 ---
stop_event = threading.Event()
r5_state = {
"theta": None,
"theta_prev": None,
"vel_lp": 0.0,
"t_recv": None,
"t_recv_prev": None
}
theta_cmd_current = np.deg2rad(THETA_EQ_DEG) # 실제 보낸 최신 지령
theta_cmd_filt = np.deg2rad(THETA_EQ_DEG) # 저역통과를 거친 지령(출력용)
###############################################################################
# 유틸 / 통신 함수
###############################################################################
def command_send(sock, target_ip, target_port, command_setpoint):
"""EF_{theta} 포맷으로 위치 지령 전송 + 최신 상태 로깅"""
global dict_list
message = f"EF_{command_setpoint:.6f}".encode('utf-8')
send_time = time.time()
sock.sendto(message, (target_ip, target_port))
# 로그용: 마지막 수신 각도를 붙여 기록(없으면 NaN)
if dict_list:
angles = list(map(dict_list[-1].get, cols[1:-1])) # r0..r6
else:
angles = [np.nan] * 7
values = [send_time] + angles + [command_setpoint]
dict_data = {c: v for c, v in zip(cols, values)}
dict_list.append(dict_data)
def command_loop(sock, target_ip, target_port, start, end, delay):
"""±delta step 과제"""
for i in range(start, end + 1):
if i % 2 == 0:
angle_setpoint = np.deg2rad(90.0 + delta_theta_deg)
else:
angle_setpoint = np.deg2rad(90.0 - delta_theta_deg)
command_send(sock, target_ip, target_port, angle_setpoint)
print(f"[STEP] loop {i}, cmd={angle_setpoint:.3f} rad")
time.sleep(delay)
def udp_receiver(sock, start, end, delay, timeout=5):
"""Harmony에서 온 7개 double(r0..r6)을 수신하고 로깅 + r5 상태 업데이트"""
global dict_list, r5_state
sock.settimeout(timeout)
duration = (end - start) * delay + 15 if not RESISTIVE_MODE else (RESISTIVE_RUN_SEC + 5)
start_time = time.time()
while (time.time() - start_time) < duration and not stop_event.is_set():
try:
data, addr = sock.recvfrom(1024)
recv_time = time.time()
# 최소 7*8=56 bytes 필요
if len(data) < 56:
continue
try:
angle_values = list(struct.unpack('7d', data[:56]))
except struct.error:
continue
# 현재 setpoint 추적(마지막 dict_list의 r5_set 사용)
angle_setpoint = dict_list[-1][cols[-1]] if dict_list else start_setpoint
# 로깅
values = [recv_time] + angle_values + [angle_setpoint]
dict_data = {c: v for c, v in zip(cols, values)}
dict_list.append(dict_data)
# r5 상태 업데이트
r5_state["theta_prev"] = r5_state["theta"]
r5_state["t_recv_prev"] = r5_state["t_recv"]
r5_state["theta"] = angle_values[5] # r5_theta
r5_state["t_recv"] = recv_time
except socket.timeout:
print("[RX] timeout, exit receiver")
break
###############################################################################
# PD 컨트롤러 (I 없음)
###############################################################################
def pd_resistive_controller(sock, target_ip, target_port):
"""
'평형각(theta_eq)' 기준의 PD(스프링+댐퍼)로 setpoint를 미세 조정하여 저항감 제공.
- D는 측정치 기반(vel)으로 계산 => step 변화 시 D-kick 방지
- setpoint 자체도 1차 LPF + 변화율 제한 + 안전 클램프
"""
global theta_cmd_current, theta_cmd_filt
Ts = 1.0 / CTRL_HZ
theta_eq = np.deg2rad(THETA_EQ_DEG)
next_t = time.monotonic()
while not stop_event.is_set():
# 주기 정렬 (드리프트 최소화)
now_t = time.monotonic()
if now_t < next_t:
time.sleep(next_t - now_t)
next_t += Ts
t0 = time.time()
th = r5_state["theta"]
th_prev = r5_state["theta_prev"]
t_recv = r5_state["t_recv"]
t_recv_prev = r5_state["t_recv_prev"]
if th is None or th_prev is None or t_recv is None or t_recv_prev is None:
continue
# 실제 수신 간격 기반 속도 추정
dt_meas = max(1e-3, t_recv - t_recv_prev)
vel_raw = (th - th_prev) / dt_meas
# 소속도 무시(미세 떨림 제거) + 1차 LPF
if abs(vel_raw) < DEADBAND_VEL:
vel_raw = 0.0
r5_state["vel_lp"] = (1 - DERIV_LP_ALPHA) * r5_state["vel_lp"] + DERIV_LP_ALPHA * vel_raw
vel = r5_state["vel_lp"] # 미분(속도) 추정치
# PD 제어: setpoint 오프셋 = -Kp*(th - theta_eq) - Kd*vel
# - 위치가 평형각보다 +방향이면 setpoint를 -쪽으로 당겨 '복원력' 생성
# - +방향으로 빠르게 움직이면 setpoint를 더 -쪽으로 당겨 '점성 저항' 생성
pos_err = (th - theta_eq) # 측정치 기준 오차(참조 = theta_eq)
offset_pd = -KP * pos_err - KD * vel
theta_target = theta_eq + offset_pd
# 안전 각도 제한
theta_target = float(np.clip(theta_target, THETA_MIN, THETA_MAX))
# 지령 저역통과(출력 스무딩) -> setpoint 자체를 더 매끈하게
theta_cmd_filt = (1 - CMD_LP_ALPHA) * theta_cmd_filt + CMD_LP_ALPHA * theta_target
# 지령 변화율 제한(사용자/기계 안전)
max_step = MAX_CMD_RATE * Ts
step = float(np.clip(theta_cmd_filt - theta_cmd_current, -max_step, max_step))
theta_cmd_current += step
# 전송
command_send(sock, target_ip, target_port, theta_cmd_current)
# (옵션) 남은 시간 슬립으로 주기 유지 (위의 주기 정렬로 대체 가능)
dt_sleep = Ts - (time.time() - t0)
if dt_sleep > 0:
time.sleep(dt_sleep)
###############################################################################
# 플로팅/후처리
###############################################################################
def find_edges(setpoints):
edges_idx = []
for i in range(1, len(setpoints)):
if setpoints[i - 1] != setpoints[i]:
edges_idx.append(i)
return edges_idx
def plot_data(filename, plot_vlines=True):
df = pd.read_csv(filename)
edges_idx = find_edges(df.r5_set)
plt.plot(df.time, df.r5_theta, label='measured angle')
plt.plot(df.time, df.r5_set, label='setpoint')
deltat = 0.04
if plot_vlines and len(edges_idx) > 0:
for idx, edge_idx in enumerate(edges_idx):
if idx == 0:
plt.axvline(df.iloc[edge_idx]['time'] + deltat, color='r', label="0.04 s after command")
plt.axvline(df.iloc[edge_idx]['time'] + 0.165, color='k', label="0.165 s after command")
else:
plt.axvline(df.iloc[edge_idx]['time'] + deltat, color='r')
plt.axvline(df.iloc[edge_idx]['time'] + 0.165, color='k')
plt.legend()
plt.xlabel('Time (s)')
plt.ylabel('Angle (rad)')
plt.title(filename)
plt.show()
###############################################################################
# 메인
###############################################################################
if __name__ == "__main__":
# 과거 CSV만 그림 그리고 싶으면 True
ONLY_PLOT = False
file_only_plot = "" # 예: 'command-angle-11-11-2025_15-10-00.csv'
if ONLY_PLOT:
plot_data(file_only_plot, plot_vlines=False)
raise SystemExit(0)
# 소켓 준비
sock = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
sock.bind(("0.0.0.0", LOCAL_PORT))
# 수신 스레드 시작
start = 0
end = 10
delay = 5
receiver_thread = threading.Thread(target=udp_receiver, args=(sock, start, end, delay))
receiver_thread.daemon = True
receiver_thread.start()
# 초기 평형각으로 세팅
time.sleep(0.5)
theta_cmd_current = np.deg2rad(THETA_EQ_DEG)
theta_cmd_filt = theta_cmd_current
command_send(sock, TARGET_IP, TARGET_PORT, theta_cmd_current)
time.sleep(0.5)
if RESISTIVE_MODE:
# PD 저항 모드: 고주기 제어 스레드
ctrl_thread = threading.Thread(target=pd_resistive_controller, args=(sock, TARGET_IP, TARGET_PORT))
ctrl_thread.daemon = True
ctrl_thread.start()
# 설정 시간 동안 실행
time.sleep(RESISTIVE_RUN_SEC)
stop_event.set()
ctrl_thread.join()
else:
# 기존 step 과제
command_loop(sock, TARGET_IP, TARGET_PORT, start, end, delay)
command_send(sock, TARGET_IP, TARGET_PORT, start_setpoint)
# 수신 스레드 종료 대기
receiver_thread.join()
# 소켓 닫기
sock.close()
print("Done")
# CSV 저장 + 플롯
df_final = pd.DataFrame.from_dict(dict_list)
date_time = now.strftime("%m-%d-%Y_%H-%M-%S")
filename = 'command-angle-' + date_time + '.csv'
df_final.to_csv(filename, index=False)
print(f"Saved: {filename}")
plot_data(filename)
이 pid 컨트롤 코드로는 여전히 osciliate가 심한 상태
어떻게 개선할 것 인가??
12/9/2025
현재 한 관절 잡아서 kp, ki, kd 값 파라미터 튜닝중
어떤걸 기준으로 파라미터 튜닝해야하는지 모르겠음
https://uofh-my.sharepoint.com/![]() /r/personal/hcha2_cougarnet_uh_edu/_layouts/15/Doc.aspx?sourcedoc=%7BEA728D6B-0A5D-4F3D-B7E0-7928D1B9F647%7D&file=PID_Tuning_Template_Harmony.xlsx&action=default&mobileredirect=true&wdOrigin=APPHOME-WEB.DIRECT%2CAPPHOME-WEB.BANNER.UPLOAD&wdPreviousSession=ada5ebb7-da55-447e-a1de-21adf03d8f00&wdPreviousSessionSrc=AppHomeWeb&ct=1765320400067
/r/personal/hcha2_cougarnet_uh_edu/_layouts/15/Doc.aspx?sourcedoc=%7BEA728D6B-0A5D-4F3D-B7E0-7928D1B9F647%7D&file=PID_Tuning_Template_Harmony.xlsx&action=default&mobileredirect=true&wdOrigin=APPHOME-WEB.DIRECT%2CAPPHOME-WEB.BANNER.UPLOAD&wdPreviousSession=ada5ebb7-da55-447e-a1de-21adf03d8f00&wdPreviousSessionSrc=AppHomeWeb&ct=1765320400067
관련 링크임
여기서 파라미터값 수정중이다