임피던스 컨트롤
1. 개요
로봇 팔이나 재활 로봇에서 사람이 느끼는 저항감(무게감, 스프링 느낌) 을 설계하고 싶을 때
가장 많이 쓰는 방법이 임피던스 컨트롤(impedance control) 이다.
임피던스 컨트롤의 아이디어는 단순하다.
“사람이 조인트를 밀었을 때, 조인트가 가상의 질량–댐퍼–스프링 시스템 처럼 반응하게 만들자.”
그래서 실제 로봇의 관성, 마찰, 중력과 상관없이
사람 입장에서는 우리가 정한 $I_d, b_d, k_d$ 값대로 동작하는 것처럼 느끼게 된다.
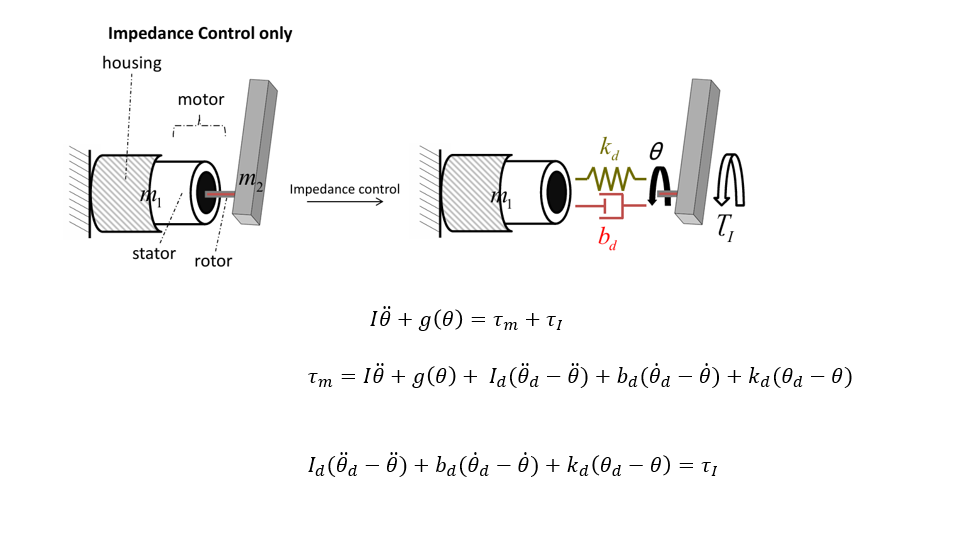
위 그림처럼 모터가 달린 조인트에 사람이 토크를 가한다고 생각해 보자.
2. 조인트 동역학 모델
먼저 조인트의 실제 동역학은 다음과 같이 쓴다.
\[I\ddot\theta + g(\theta) = \tau_m + \tau_I\](1)
- $I$: 조인트의 실제 관성(moment of inertia)
- $\theta$: 조인트 각도
- $g(\theta)$: 중력에 의한 토크(중력 보상 항)
- $\tau_m$: 모터(컨트롤러)가 조인트에 가하는 제어 토크
- $\tau_I$: 사람(또는 환경)이 조인트에 가하는 외란/인터랙션 토크
즉, 모터 토크와 사람 토크의 합이 관성 + 중력 항을 만들어 내는 것이 (1)식이다.
3. 임피던스 컨트롤러의 형태
임피던스 컨트롤에서는 사람이 느낄 “가상의” 질량–댐퍼–스프링을 정해 준다.
- 원하는 질량: $I_d$
- 원하는 점성(댐핑): $b_d$
- 원하는 스프링 상수: $k_d$
- 원하는 궤적(각도, 속도, 가속도): $\theta_d, \dot\theta_d, \ddot\theta_d$
컨트롤러는 모터 토크를 다음과 같이 만든다고 가정한다.
\[\tau_m = I\ddot\theta + g(\theta) + I_d(\ddot\theta_d - \ddot\theta) + b_d(\dot\theta_d - \dot\theta) + k_d(\theta_d - \theta)\](2)
앞의 $I\ddot\theta + g(\theta)$ 항은 실제 관성과 중력을 보상해 주는 부분이고,
뒤의 세 항이 가상의 mass–damper–spring 에 해당하는 부분이다.
4. 외력–변위 관계 유도
이제 (2)를 조인트 동역학 (1)에 대입해 보자.
(1)식에 (2)를 넣으면
\[I\ddot\theta + g(\theta) = \Big[ I\ddot\theta + g(\theta) + I_d(\ddot\theta_d - \ddot\theta) + b_d(\dot\theta_d - \dot\theta) + k_d(\theta_d - \theta) \Big] + \tau_I\]좌우에서 $I\ddot\theta + g(\theta)$를 지워주면
\[I_d(\ddot\theta_d - \ddot\theta) + b_d(\dot\theta_d - \dot\theta) + k_d(\theta_d - \theta) = -\,\tau_I\]부호 정의를 바꾸어(또는 오른쪽으로 넘겨서) 정리하면 보통 다음과 같이 쓴다.
\[I_d(\ddot\theta_d - \ddot\theta) + b_d(\dot\theta_d - \dot\theta) + k_d(\theta_d - \theta) = \tau_I\](3)
이 식이 임피던스 컨트롤의 핵심이다.
사람(외부)이 가하는 토크 $\tau_I$ 가
“가상의 질량–댐퍼–스프링” $(I_d, b_d, k_d)$ 의 오차에 비례하는 값이 되도록
컨트롤러가 $\tau_m$ 을 만들어 준다.
즉, 사람 입장에서는 조인트가
$\theta_d$ 주변에서 질량 $I_d$, 댐핑 $b_d$, 스프링 $k_d$ 를 가진 시스템처럼 느껴진다.
5. 요약
- $\tau_m$: 모터가 조인트에 가하는 제어 토크
- $\tau_I$: 사람이(또는 환경이) 조인트에 가하는 외란 토크
- 임피던스 컨트롤은 실제 로봇의 관성·중력을 보상하고
사람이 느끼는 가상의 mass–damper–spring 파라미터 $I_d, b_d, k_d$ 를 설계하는 컨트롤이다. - 최종적으로 사람 토크 $\tau_I$ 와 조인트의 운동 오차 $(\theta_d - \theta)$ 사이의 관계가
(3)식과 같은 선형 임피던스 관계를 만족하도록 만드는 것이 목표다.
이렇게 정리해 두면, 나중에 재활 로봇 실험에서
“어깨 조인트에 어떤 임피던스 값을 넣었는지”,
“사람이 느끼는 stiffness/damping을 어떻게 설계했는지” 를 설명할 때 그대로 가져다 쓸 수 있다.